



什么是视觉SLAM
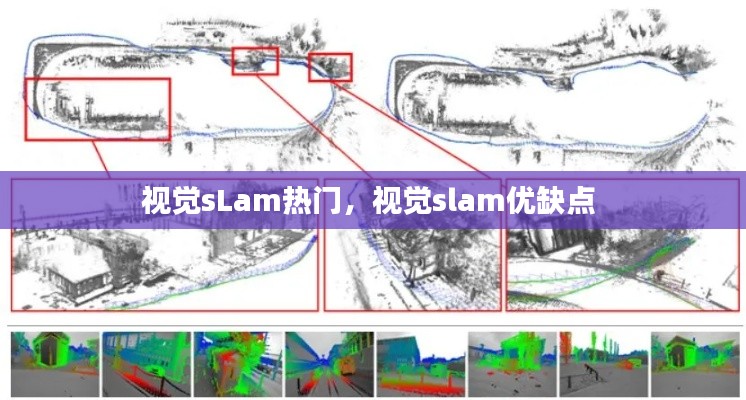
视觉SLAM,即视觉同步定位与映射,是一种通过视觉信息进行环境感知和定位的技术。它利用摄像头捕捉的图像或视频序列,通过图像处理、计算机视觉和机器学习等方法,实现对周围环境的理解,并实时估计移动设备的位姿。视觉SLAM在机器人、自动驾驶、增强现实等领域有着广泛的应用前景。
视觉SLAM的发展历程
视觉SLAM技术的研究始于20世纪90年代,最初主要用于机器人导航。随着计算机性能的提升和图像处理技术的进步,视觉SLAM逐渐成为机器人领域的研究热点。近年来,随着深度学习等人工智能技术的快速发展,视觉SLAM技术取得了显著的突破,应用范围也不断扩大。
视觉SLAM的关键技术
视觉SLAM技术涉及多个领域,主要包括以下几个方面:
特征提取:从图像中提取具有稳定性和可重复性的特征点,如SIFT、SURF等。
特征匹配:将当前帧的特征点与历史帧中的特征点进行匹配,以建立图像之间的对应关系。
运动估计:根据特征点的匹配关系,估计摄像头的运动状态,包括旋转和平移。
地图构建:利用运动估计的结果,将环境中的特征点构建成三维地图。
回环检测:检测和纠正由于视觉噪声或运动估计误差导致的错误匹配和累积误差。
视觉SLAM的热门应用
随着视觉SLAM技术的不断发展,其应用领域也越来越广泛。以下是一些视觉SLAM的热门应用:
机器人导航:在室内外环境中,视觉SLAM可以帮助机器人实现自主导航,避免碰撞,并完成各种任务。
自动驾驶:视觉SLAM技术可以用于自动驾驶车辆的感知和定位,提高行驶安全性。
增强现实:在增强现实应用中,视觉SLAM可以实时追踪用户的位置和姿态,实现虚拟物体与真实世界的融合。
无人机:视觉SLAM技术可以帮助无人机在复杂环境中进行自主飞行,提高飞行效率和安全性。
三维重建:通过视觉SLAM技术,可以实现对场景的三维重建,为虚拟现实、游戏等领域提供数据支持。
视觉SLAM的挑战与未来
尽管视觉SLAM技术在多个领域取得了显著的应用成果,但仍面临一些挑战:
光照变化:不同光照条件下,图像特征点的提取和匹配效果会受到影响。
动态场景:动态场景中的物体和背景难以区分,容易导致错误匹配和定位。
计算复杂度:视觉SLAM算法的计算复杂度较高,对硬件资源要求较高。
为了克服这些挑战,未来的视觉SLAM研究将重点关注以下几个方面:
鲁棒性:提高算法对光照变化、动态场景等复杂环境的适应性。
实时性:降低算法的计算复杂度,实现实时定位和映射。
准确性:提高定位和映射的准确性,满足不同应用场景的需求。
随着技术的不断进步,相信视觉SLAM将在未来发挥更大的作用,为我们的生活带来更多便利。
总结
视觉SLAM作为一种新兴的定位与映射技术,凭借其独特的优势在多个领域得到了广泛应用。随着研究的深入和技术的不断发展,视觉SLAM有望在未来取得更大的突破,为人类社会带来更多创新和进步。
转载请注明来自专业的汽车服务平台,本文标题:《视觉sLam热门,视觉slam优缺点 》






 琼ICP备2024026137号-1
琼ICP备2024026137号-1