




引言
随着科技的不断发展,汽车行业也在不断进步。为了提高行车安全,减少交通事故,汽车远程实时雷达技术应运而生。本文将详细介绍汽车远程实时雷达的原理图,帮助读者更好地理解这一先进技术的运作机制。
汽车远程实时雷达概述
汽车远程实时雷达是一种利用电磁波探测目标距离、速度和方位的传感器。它广泛应用于汽车辅助驾驶系统,如自适应巡航控制(ACC)、自动紧急制动(AEB)和车道保持辅助(LKA)等。与传统雷达相比,汽车远程实时雷达具有更高的精度、更远的探测距离和更快的响应速度。
工作原理
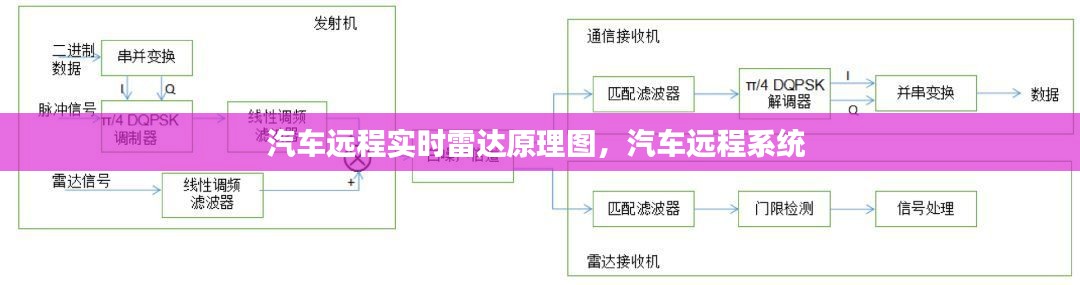
汽车远程实时雷达的工作原理基于多普勒效应。雷达发射器发出高频电磁波,当这些电磁波遇到障碍物时,部分能量会被反射回来。雷达接收器捕捉到反射回来的电磁波,通过分析其频率变化,可以计算出障碍物的距离、速度和方位。
原理图解析
以下是汽车远程实时雷达的原理图解析:
发射器
发射器是雷达系统的核心部分,负责产生高频电磁波。通常,发射器采用一个振荡器产生高频信号,然后通过放大器放大信号,最后通过天线发射出去。
接收器
接收器负责捕捉反射回来的电磁波。它通常包括一个天线、一个低噪声放大器和一个混频器。天线捕捉到反射回来的电磁波,低噪声放大器放大信号,混频器将接收到的信号与发射器发出的信号进行混频,以便后续处理。
信号处理器
信号处理器是雷达系统的关键部分,负责处理接收到的信号。它主要包括以下功能:
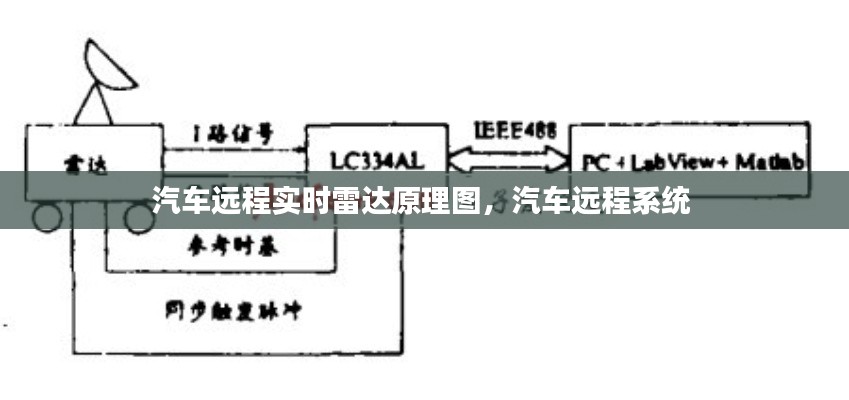
- 多普勒滤波:通过滤波器提取多普勒频移,从而计算出目标的速度。
- 距离计算:根据多普勒频移和已知信号传播速度,计算出目标的距离。
- 方位估计:通过分析反射信号的相位变化,估计目标的方位。
显示与控制单元
显示与控制单元负责将处理后的信息显示给驾驶员,并控制雷达系统的运行。它通常包括一个显示屏和一个控制器,驾驶员可以通过控制器调整雷达系统的参数,如探测距离、灵敏度等。
总结
汽车远程实时雷达技术为现代汽车提供了更高的安全性和便利性。通过本文对原理图的解析,读者可以更好地理解这一技术的运作机制。随着技术的不断进步,未来汽车远程实时雷达将在更多领域发挥重要作用,为人类出行提供更加安全、舒适的保障。
转载请注明来自专业的汽车服务平台,本文标题:《汽车远程实时雷达原理图,汽车远程系统 》








 琼ICP备2024026137号-1
琼ICP备2024026137号-1