



引言
随着科技的飞速发展,无人机技术逐渐成熟并广泛应用于各个领域,如军事、农业、交通、环保等。无人机集群作为一种新兴的技术,具有高效、灵活、智能的特点,能够完成复杂的任务。然而,无人机集群的实时控制是保证其高效运行的关键。本文将探讨无人机集群实时控制软件的设计与实现,旨在提高无人机集群的作业效率和安全性。
无人机集群实时控制软件概述
无人机集群实时控制软件是无人机集群系统的核心部分,主要负责对无人机集群的飞行状态、任务分配、协同控制等进行实时监控和管理。该软件应具备以下特点:
- 实时性:能够对无人机集群的飞行状态进行实时监测,确保任务执行的准确性。
- 可靠性:在复杂环境下,软件应具备较高的可靠性,确保无人机集群的稳定运行。
- 可扩展性:随着无人机集群规模的扩大,软件应具备良好的可扩展性,以适应不同规模的任务需求。
- 安全性:确保无人机集群在执行任务过程中不会对地面设施和人员造成伤害。
无人机集群实时控制软件设计
无人机集群实时控制软件的设计主要包括以下几个方面:
1. 系统架构设计
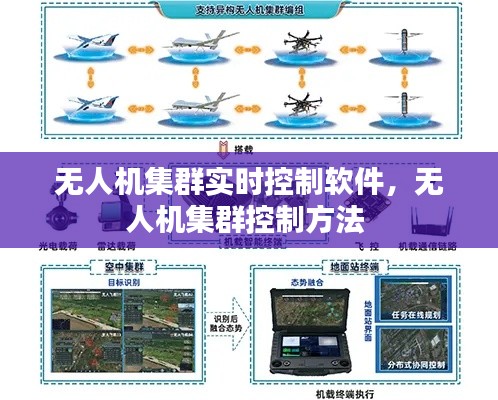
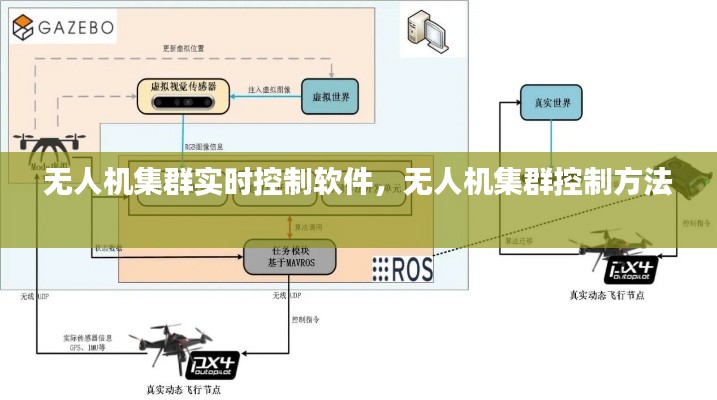
无人机集群实时控制软件采用分层架构设计,包括数据采集层、数据处理层、决策控制层和执行层。数据采集层负责收集无人机集群的飞行数据;数据处理层对采集到的数据进行预处理和融合;决策控制层根据任务需求和飞行状态进行决策;执行层负责将决策结果传递给无人机集群,并执行相应的操作。
2. 任务分配策略
任务分配是无人机集群实时控制软件的关键功能之一。根据任务类型、无人机性能、任务区域等因素,设计合理的任务分配策略,确保无人机集群高效、有序地完成任务。常见的任务分配策略包括基于距离的任务分配、基于负载的任务分配和基于优先级的任务分配等。
3. 协同控制算法
无人机集群在执行任务过程中,需要实现协同控制,以确保集群内无人机之间的协调和配合。常见的协同控制算法包括基于多智能体系统的协同控制、基于图论的方法和基于遗传算法的协同控制等。
4. 实时监控与反馈
实时监控是无人机集群实时控制软件的重要功能,通过对无人机集群的飞行状态、任务执行情况进行实时监控,及时发现并处理异常情况。同时,软件应具备反馈机制,将监控结果反馈给决策控制层,以便及时调整决策策略。
无人机集群实时控制软件实现
无人机集群实时控制软件的实现主要涉及以下技术:
- 嵌入式系统:用于无人机集群的数据采集、处理和执行层。
- 无线通信技术:实现无人机集群与地面控制站之间的数据传输。
- 实时操作系统(RTOS):保证软件的实时性和可靠性。
- 人工智能技术:用于任务分配、协同控制和决策制定。
结论
无人机集群实时控制软件是无人机集群系统的重要组成部分,其设计与实现对于提高无人机集群的作业效率和安全性具有重要意义。本文对无人机集群实时控制软件的设计与实现进行了探讨,为无人机集群技术的发展提供了有益的参考。
转载请注明来自专业的汽车服务平台,本文标题:《无人机集群实时控制软件,无人机集群控制方法 》





 琼ICP备2024026137号-1
琼ICP备2024026137号-1